It is easy to generate and test solutions for
such tasks in Prolog. If this is done naively (either
in Prolog or with any other language), then it quickly leads to
infeasible programs, because there are typically too many
combinations to generate them all.
To efficiently solve combinatorial optimization tasks in many
cases of practical relevance, Prolog provides a declarative
solution called constraints. Importantly, constraints
can prune large parts of the search tree before the
search even begins, and also while the search is progressing. In
typical cases, this is vastly more efficient than naively
enumerating solutions. In addition, constraints retain the
generality we expect from relations, and so you can use
constraint-based Prolog programs
for generating, testing and completing
solutions of combinatorial tasks.
In principle, constraints can be provided by any programming
language. However, they blend in especially seamlessly
into logic programming languages like Prolog due
to their relational nature and built-in search and backtracking
mechanisms. For this reason, logic programming languages have
become the most important host languages for constraints, and all
widely used Prolog systems ship with several libraries or
built-in predicates for constraint solving.
CLP(X) stands for constraint logic
programming over the domainX.
Plain Prolog can be regarded as a CLP(H): Constraint
logic programming over Herbrand terms,
with (=)/2 and dif/2 as the most important
constraints that denote, respectively, equality and disequality
of terms.
There are dedicated libraries for several important domains.
Support of these libraries differs between Prolog systems, so
check your Prolog system's manual for more information.
For example, SICStus Prolog ships with:
CLP(FD) for integers
CLP(B) for Boolean variables
CLP(Q) for rational numbers
CLP(R) for floating point numbers
In Prolog,
declarative integer arithmetic
can thus be naturally used for solving combinatorial tasks.
Here is an example:
A chicken farmer also has some cows for a total
of 30 animals, and the animals
have 74 legs in all.
Note that no search was necessary at all. The constraint
solver has deduced the unique solution of the puzzle
via constraint propagation.
In industrial and academic use, the efficiency of a Prolog
system's constraint solvers is often an important factor when
choosing a system. This is because many commercial use cases
of Prolog also involve combinatorial optimization tasks.
Integers are the most relevant domain in practice, because
all finite domains can be mapped to finite subsets
of integers. Hence, all finite combinatorial
optimization tasks can be expressed via CLP(FD) constraints.
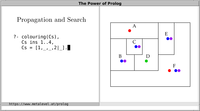
Example: Map Colouring
Let us consider map colouring, i.e., the task of assigning
colours to regions of a map in such a way that no
adjacent regions are assigned the same colour.
Video:
We can easily map this task to a combinatorial task
over integers, by using one variable for each region, and
one integer for each colour.
For concreteness, let us colour the following map:
We shall use the integers 0, 1, 2, ..., to represent
suitable colours. Moreover, we know from
the Four
Colour Theorem that at most 4 colours suffice.
regions(Rs) :-
Rs = [A,B,C,D,E,F],
Rs ins 0..3,
A #\= B, A #\= C, A #\= D, A #\= F,
B #\= C, B #\= D,
C #\= D, C #\= E,
D #\= E, D #\= F,
E #\= F.
Disequality constraints ((#\=)/2) are used to state that
pairs of integers that correspond to adjacent regions must
be different.
To obtain concrete solutions, we use labeling:
availability of global constraints tailored for specific applications.
Graphs
Graphs are an extremely important concept in mathematics
and computer science, and many combinatorial tasks can be
formulated as problems involving graphs. For example, the
preceding map colouring task is
an instance of a more general task
called graph colouring.
Video:
We distinguish between directed and undirected
graphs.
Directed graphs
A directed graph consists of:
a set V of vertices
a set A of arcs, which are directed edges of
the form v→w (v, w
∈ V).
In Prolog, there are different ways to represent
directed graphs. One way to do it is to write down the arcs
as Prolog facts:
Such a representation is called temporal, because solutions
are iteratively reported on backtracking. This
representation is very well suited for making large amounts
of data efficiently accessible. An example use case is a
set of public transport routes between different
locations.
A typical way to describe paths with such a representation is:
?- bagof(To, arc_from_to(From, To), Arcs).
From = a, Arcs = "bc"
; From = b, Arcs = "c"
; From = c, Arcs = "a".
With these predicates, we can obtain a representation of the graph
in the form of an adjacency list, where we store which
vertices are reachable from any given vertex:
?- findall(From-Ls, bagof(To, arc_from_to(From, To), Ls), Is).
Is = [a-"bc",b-"c",c-"a"].
In Prolog, this is often a good representation for graphs. We
can easily turn this into
an association list of the
form V→Vs to obtain logarithmic worst
case (and expected) access time when fetching the
vertices Vs that are reachable from any given
vertex V. For utmost efficiency, if your Prolog system
supports it, you can represent each vertex as a
Prolog variable, and attach information (including arcs) in
the form of
variable attributes.
This even allows destructive modifications in O(1). With this
method, you can for example efficiently compute the strongly
connected components of a directed graph.
See scc.pl for more
information.
Note that isolated vertices do not participate in
any arc, and so—at least in general—we also
need to represent the vertices separately:
vertices("abcd").
In the adjacency list representation, the isolated
vertex d can be represented as d-[].
Undirected graphs
An undirected graph consists of:
a set N of nodes
a set E of undirected edges of the
form x−y (x, y
∈ N).
For example, let us reconsider the map colouring task from
a graph theoretic perspective. The CLP(FD) formulation
can be regarded as implicitly describing a graph that
is induced by the constraints that are stated between the
variables. We now make that graph available explicitly as a
Prolog term that represents an undirected graph:
?- bagof(E, edge(N, E), Es).
Es = "bcdf", N = a
; Es = "cda", N = b
; Es = "deab", N = c
; Es = "efabc", N = d
; Es = "fcd", N = e
; Es = "ade", N = f.
An explicit representation is well suited for further analysis of
the graph.
Trees
In graph theory, a tree is an undirected graph in which any
two nodes are connected by exactly one path.
In Prolog, trees are of special significance because
Prolog terms naturally correspond
to trees.
For example, we can fairly enumerate binary trees as follows:
?- length(Ls, _), phrase(tree(T), Ls).
Ls = [], T = nil
; Ls = [_A], T = node(_B,nil,nil)
; Ls = [_A,_B], T = node(_C,nil,node(_D,nil,nil))
; Ls = [_A,_B], T = node(_C,node(_D,nil,nil),nil)
; Ls = [_A,_B,_C], T = node(_D,nil,node(_E,nil,node(_F,nil,nil)))
; ... .
Further reading
Here are several applications that give you an impression of what
you can do with a CLP(FD) system:
Other constraint solvers and libraries also have important
applications. For example, see
logic puzzles for several use
cases of CLP(B), and a delayed
column generation example with library(simplex).